


自律移動ロボット (AMR) における LiDAR の役割の探究
2D TOF LiDAR とは何ですか? AMR ではどのように機能しますか?
2D TOF ライダー
2D TOF LiDAR (2次元飛行時間型LiDAR) は、飛行時間 (TOF) 原理に基づくレーザーレーダーシステムで、2次元空間測定に使用されます。ターゲットに向けてレーザービームを発射し、レーザーが発射されてターゲットで反射されて戻ってくるまでの時間 (つまり飛行時間) を測定して、ターゲットとLiDAR間の距離を正確に計算します。反射信号は、処理されると、ターゲットに関する距離情報を提供します。LiDARのスキャンメカニズム (回転ミラーやリニアスキャンなど) を組み込むことで、システムは2次元平面におけるターゲットの位置 (つまり方位角) をさらに特定できます。
自律移動ロボット(AMR)
AMR について議論するとき、人々はよく別の関連する概念である AGV を思い浮かべます。
AGV は「Automated Guided Vehicle (自動誘導車両)」の略で、事前に定義されたガイド パスに沿って自動的に移動できるタイプの車両であり、通常は物体の輸送を支援するために使用されます。AGV は設定されたガイド パスに沿って移動し、移動中に障害物に遭遇した場合は停止して障害物が取り除かれるまで待機し、その後、設定されたパスに沿って移動を続行して輸送タスクを完了します。
AMR は「Autonomous Mobile Robot」の略で、自律ナビゲーションによって無軌道移動を実現し、物体処理能力を高めるためにロボット アームを装備することがよくあります。AMR は、現在の移動経路を事前に保存された地図とリアルタイムで比較できます。移動中に障害物が現れた場合、システムは障害物を回避して指定された場所に到達するための最適なルートを即座に再計算します。
AMR の一般的な自律移動方式には、LiDAR ナビゲーション (LiDAR SLAM) と視覚ナビゲーション (Visual SLAM) があります。この記事では、AMR の LiDAR ナビゲーションに焦点を当てます。
LD-05D 2D TOF ライダー
DADISICKのLD-05D 2D TOF LiDARは自己学習機能を備えており、ユーザーは「LD Designer」ソフトウェアを通じて作業領域を設定できます。「自己学習」ボタンを3秒間押し続けると、デバイスは自己学習モードに入ります。このモードでは、2D LiDARは水平レーザースキャンを実行して、ロボットの周囲の環境の2D輪郭情報をすばやくキャプチャし、スキャンした輪郭を使用して作業領域の境界を定義します。
AMR システムにおける 2D TOF LiDAR の主な機能
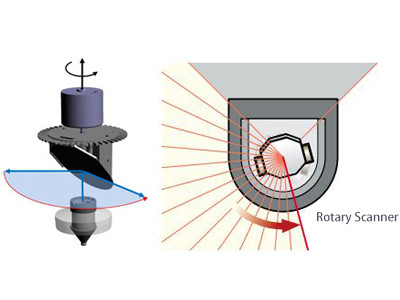
レーダースキャン:
2D LiDAR は、レーザー光線を発射し、周囲の物体から反射された信号を受信することで水平面をスキャンします。これらの信号は、物体とレーダー間の距離と角度 (通常は方位角) を測定するために使用されます。
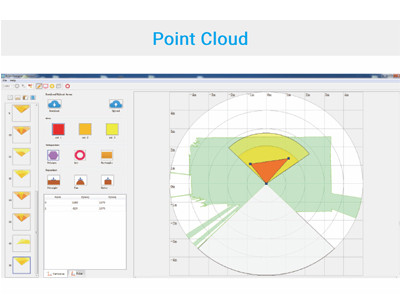
ポイントクラウド生成:
スキャン処理中に、レーダーによって収集されたデータ ポイント (距離と角度) は、2D 座標系のポイント クラウドに変換されます。これらのポイント クラウド データ ポイントは、レーダーのスキャン面内のオブジェクトの位置と形状を表します。
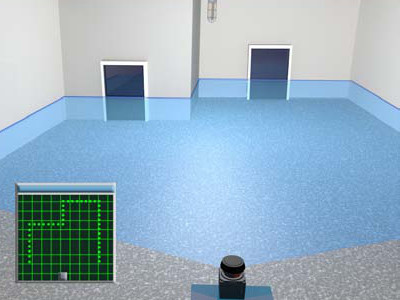
マップ構築:
ポイント クラウド データに基づいて、環境の 2D マップを生成できます。このマップは占有グリッド マップの形式にすることができ、各グリッド セルは環境の小さな領域を表し、レーダー データに基づいて空き (移動可能)、占有 (障害物あり)、または不明としてマークされます。
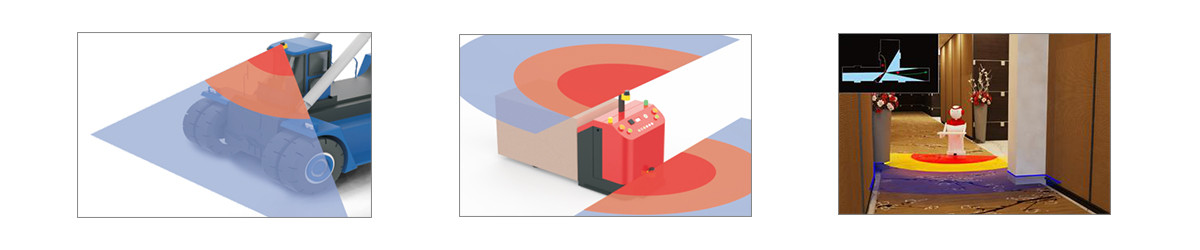
自律航行
2D LiDAR を搭載した AMR では、通常、gmapping、hector、karto、cartographer などの 2D 環境に適したアルゴリズムが使用されます。これらのアルゴリズムは、2D LiDAR によって提供されるデータを活用して、マップの構築とロボットの位置特定を行います。
SLAM プロセス中、AMR は 2D LiDAR によってキャプチャされた環境データを SLAM アルゴリズムと組み合わせて使用し、作業環境の 2D マップを段階的に構築します。このマップには、障害物の位置だけでなく、壁、廊下、その他の環境特性も含まれる場合があります。
初期マップとリアルタイムの環境データにより、AMR は SLAM アルゴリズムを使用してより正確な位置特定を実現できます。構築されたマップに基づいて、AMR は経路計画を実行し、障害物を回避して目標位置に到達するための最適なルートを選択できます。
環境の変化(新しい障害物の出現や道の遮断など)が発生すると、AMR は 2D LiDAR データと SLAM アルゴリズムを使用して地図を更新し、ルートを再計画します。この動的適応メカニズムにより、AMR は継続的かつ安定した自律ナビゲーションを維持します。
考慮事項:
2D LiDAR は水平面のみをスキャンするため、障害物の高さに関する情報を提供できません。そのため、特に障害物の高さがロボットの通行性に大きく影響する場合、状況によっては AMR のナビゲーション機能が制限される可能性があります。ただし、多くの 2D 平面移動シナリオ (屋内環境や平坦な屋外エリアなど) では、2D LiDAR でマッピングとナビゲーションのニーズを満たすことができます。
2D TOF LiDARと他のセンサーの統合と今後の動向
LiDAR は、カメラや超音波センサーなどの他のセンサーと統合して、AMR の全体的なパフォーマンスを向上させることもできます。たとえば、AMR の衝突回避システムでは、超音波センサーは、ロボットの低反射率の物体を検出し、特定の環境条件に適応する能力を向上させることで、LiDAR を補完できます。さらに、ロボットと棚の間の隙間など、近距離の検出が必要なシナリオでは、超音波センサーが重要な役割を果たします。


検出範囲: 30〜300 mm、50〜500 mm、60〜1000 mm 材質: 銅ニッケルメッキ、プラスチック継手 接続タイプ: 5ピンM12コネクタ

検出範囲: 100〜2000 mm、200〜4000 mm、350〜6000 mm 材質: 銅ニッケルメッキ、プラスチック継手 接続タイプ: 5ピンM12コネクタ
