


Exploring the Role of LiDAR in Autonomous Mobile Robots (AMRs)
What is 2D TOF LiDAR and How Does It Work in AMRs?
2D TOF LiDAR
2D TOF LiDAR (Two-Dimensional Time of Flight LiDAR) is a laser radar system based on the Time of Flight (TOF) principle, used for two-dimensional spatial measurements. It operates by emitting a laser beam towards a target and measuring the time it takes for the laser to be emitted, reflected by the target, and returned (i.e., the time of flight) to precisely calculate the distance between the target and the LiDAR. The reflected signal, once processed, provides distance information about the target. By incorporating the LiDAR's scanning mechanism (such as a rotating mirror or linear scanning), the system can further determine the target's position (i.e., azimuth) in the two-dimensional plane.
Autonomous Mobile Robots (AMRs)
When discussing AMRs, people often think of another related concept—AGVs.
AGV, which stands for "Automated Guided Vehicle," is a type of vehicle that can automatically move along a predefined guide path, typically used to assist in the transportation of objects. AGVs follow a set guide path, and if they encounter an obstacle during movement, they will stop and wait until the obstacle is removed before continuing along the preset path to complete the transport task.
AMR, which stands for "Autonomous Mobile Robot," achieves trackless movement through autonomous navigation and can often be equipped with robotic arms to enhance object handling capabilities. AMRs can compare their current movement path with a pre-stored map in real-time. If an obstacle appears during movement, the system will immediately recalculate the best route to avoid the obstacle and reach the designated location.
Common autonomous movement methods for AMRs include LiDAR navigation (LiDAR SLAM) and visual navigation (Visual SLAM). This article will focus on LiDAR navigation for AMRs.
LD-05D 2D TOF LiDAR
DADISICK's LD-05D 2D TOF LiDAR features a self-learning function, allowing users to set the working area through the "LD Designer" software. By pressing and holding the "self-learning" button for 3 seconds, the device enters self-learning mode. In this mode, the 2D LiDAR performs horizontal laser scanning to quickly capture the 2D contour information of the environment surrounding the robot, using the scanned contour to define the boundaries of the working area.
Key Functions of 2D TOF LiDAR in AMR Systems
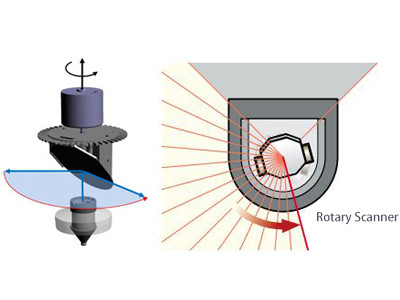
Radar Scanning:
2D LiDAR scans the horizontal plane by emitting laser beams and receiving the signals reflected from surrounding objects. These signals are used to measure the distance and angle (typically the azimuth) between the objects and the radar.
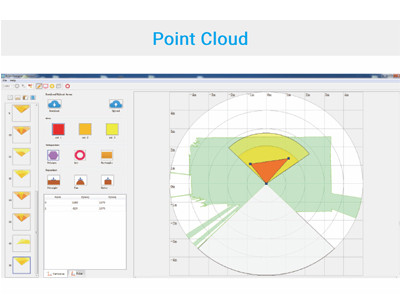
Point Cloud Generation:
During the scanning process, the data points collected by the radar (distance and angle) are converted into a point cloud in a 2D coordinate system. These point cloud data points represent the positions and shapes of objects within the radar's scanning plane.
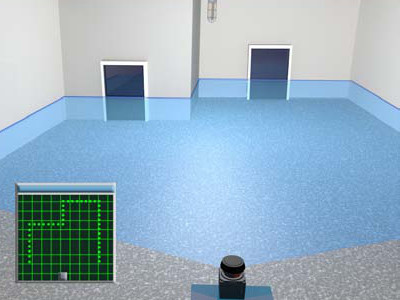
Map Construction:
Based on the point cloud data, a 2D map of the environment can be generated. This map can be in the form of an occupancy grid map, where each grid cell represents a small area of the environment and is marked as either free (navigable), occupied (obstructed), or unknown based on the radar data.
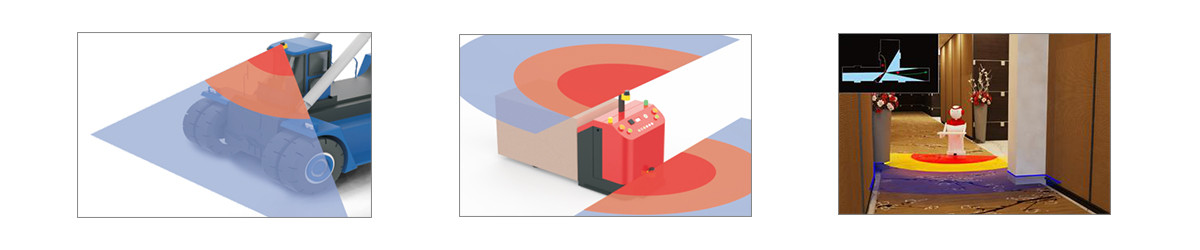
Autonomous Navigation
For AMRs equipped with 2D LiDAR, algorithms suited for 2D environments, such as gmapping, hector, karto, and cartographer, are typically used. These algorithms leverage the data provided by 2D LiDAR for map construction and robot localization.
During the SLAM process, the AMR utilizes the environmental data captured by the 2D LiDAR, combined with SLAM algorithms, to progressively construct a 2D map of the working environment. This map not only includes the location of obstacles but may also feature walls, corridors, and other environmental characteristics.
With the initial map and real-time environmental data, the AMR can achieve more precise localization using SLAM algorithms. Based on the constructed map, the AMR can perform path planning, selecting the optimal route to avoid obstacles and reach the target location.
When environmental changes occur (such as new obstacles appearing or paths being blocked), the AMR will use 2D LiDAR data and SLAM algorithms to update the map and replan the route. Through this dynamic adaptation mechanism, the AMR maintains continuous and stable autonomous navigation.
Considerations:
Since 2D LiDAR only scans on a horizontal plane, it cannot provide information about the height of obstacles, which might limit the AMR's navigation capabilities in some situations, especially when obstacle height significantly affects the robot's passability. However, in many 2D plane movement scenarios (such as indoor environments and flat outdoor areas), 2D LiDAR is sufficient for mapping and navigation needs.
2D TOF LiDAR Integration with Other Sensors and Future Trends
LiDAR can also be integrated with other sensors, such as cameras and ultrasonic sensors, to enhance the overall performance of AMRs. For example, in the collision avoidance system of an AMR, ultrasonic sensors can complement LiDAR by improving the robot's ability to detect low-reflectivity objects and adapt to specific environmental conditions. Additionally, in scenarios requiring close-range detection, such as the gaps between the robot and shelves, ultrasonic sensors can play a crucial role.
5m distance, A technique that uses a laser beam to measure distance and create detailed maps of objects and environments.

Sensing range 20m, A technique that uses a laser beam to measure distance and create detailed maps of objects and environments.

Detection range: 30-300 mm, 50-500 mm, 60-1000 mm
Material: copper nickel plating, plastic fittings
Connection type: 5-pin M12 connector

Detection range: 100-2000 mm, 200-4000 mm, 350-6000 mm
Material: copper nickel plating, plastic fittings
Connection type: 5-pin M12 connector
